3次元キャビテイスキャナーによる測定例
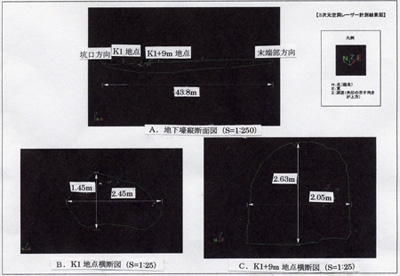
左の写真7は測定例を示すもので、防空壕のK-1,K-1+9mの2箇所でボーリングを実施し、それぞれの孔で3DキャビティスキャナーC-ALSを実施し、記録を合成したものである。両地点の位置関係は写真-7の縦断面(A)により示される。地下壕は延長43.8mで、写真左端が坑口付近である(坑口は地表からは確認できない)。断面 (B)はK-1地点の横断、断面(C)はK-1+9m地点の横断である。これから明らかなように、空洞の幅は2.05~2.45mで大きな変化はないが、高さはK1+9m地点方向へ向かって著しく増加している。
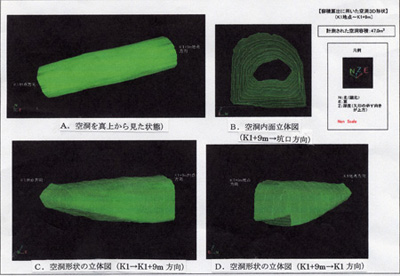
写真-8は測定記録を3次元表示したものである。図(A)は2地点間を真上から見た立体図、(B)はK-1+9m地点中心部からK-1地点中心方向を見た壕内のイメージ図、(C)はK-1地点からK-1+9m地点方向を見た立体図、(D)はK-1+9m地点から斜めにK-1地点方向を見た立体図である。
4.音響測深探査
これまで説明した地下空洞内部観察・計測手法は、すべて完全空洞に対して適用できる手法であった。しかし、実際には水没地下空洞で、写真等による直接観察が出来ないことや、レーザ測距も不可能な場合も多い。
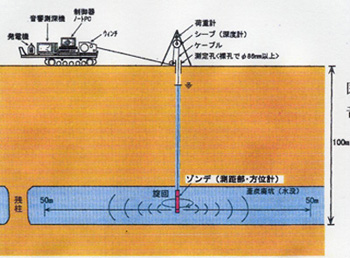
音響測深探査は、指向性の強い超音波(ソナー)を水中で発振し、その反射波到達時間から壁面までの距離を求める手法である(図-4)。センサー部は仰角30°俯角45°で発振・受振面の角度を変化できるため、立体的な測距が可能である。
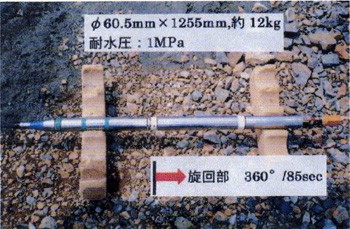
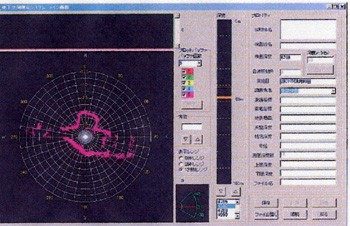
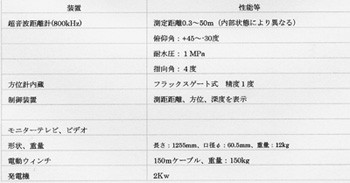
写真-9は音響測深探査本体を、写真-10には測定記録例を示した。また、表-3には機器仕様を示した。